新聞來源:MPS發(fā)布日期:2020-07-28
大家都知道醇帅,電動機線圈需要按特定的順序通電,以產(chǎn)生將與轉(zhuǎn)子對齊的磁場友多。使用多個設(shè)備向線圈提供必要的電壓昧捷,從而使電動機正常運行闲昭。搭配電動機的設(shè)備有:
晶體管橋是物理上控制電動機線圈電連接的設(shè)備。晶體管可以看作是電控斷續(xù)器徽榄,當其閉合時阐赖,它允許將線圈連接到電源,從而使線圈中的電流通過胰薪。每個電機相都需要一個晶體管電橋皆舅。
驅(qū)動器是一種控制晶體管激活的設(shè)備,提供所需的電壓和電流蓄士,然后由MCU進行控制特植。
MCU是微控制器單元,通常由電動機用戶編程肋漏,并為驅(qū)動器生成特定信號以獲得所需的電動機性能逝惑。
圖7顯示了步進電機控制方案的簡單表示。預驅(qū)動器和晶體管電橋可以包含在稱為驅(qū)動器的單個設(shè)備中茶黄。
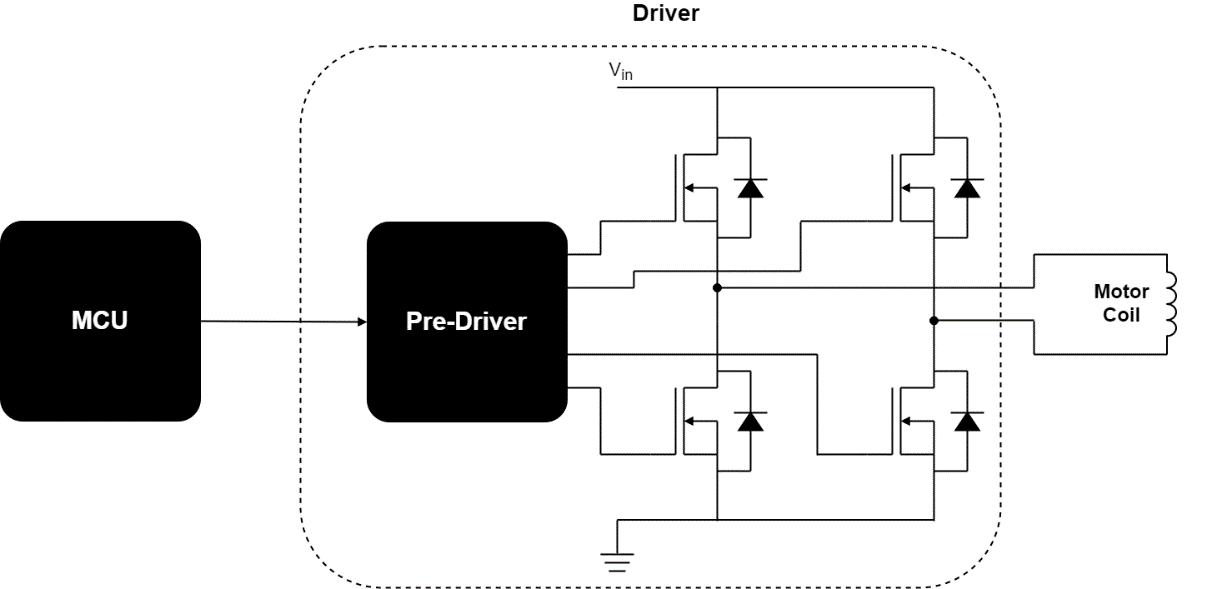
圖7:電機控制基本方案
步進電機驅(qū)動器類型
市場上有不同的步進電機驅(qū)動器巾沟,它們展示了針對特定應用的不同功能。最重要的特性包括輸入接口崔败。最常見的選項是:
步進/方向 –通過在步進引腳上發(fā)送脈沖祷安,驅(qū)動器改變其輸出,以使電機執(zhí)行步進兔乞,步進的方向由方向引腳上的電平確定汇鞭。
Phase / Enable (相位/啟用)– F或每個定子繞組相位,Phase(相位)確定電流方向庸追,如果該相位通電霍骄,則觸發(fā)Enable(啟用)。
PWM – 直接控制低端和高端FET的柵極信號。
步進電機驅(qū)動器的另一個重要特征是读整,它只能控制繞組兩端的電壓簿训,也可以控制流過繞組的電流:
通過電壓控制,驅(qū)動器僅調(diào)節(jié)繞組兩端的電壓米间。產(chǎn)生的扭矩和執(zhí)行步驟的速度僅取決于電動機和負載特性煎楣。
電流控制驅(qū)動器更先進,因為它們調(diào)節(jié)流過有源線圈的電流车伞,以便更好地控制產(chǎn)生的轉(zhuǎn)矩,從而更好地控制整個系統(tǒng)的動態(tài)行為喻喳。
單極/雙極電機
電動機的另一個影響控制的特征是定子線圈的布置关读,該布置確定了電流方向的變化方式。為了實現(xiàn)轉(zhuǎn)子的運動巍坦,不僅需要給線圈通電够戒,還需要控制電流的方向,電流的方向決定了由線圈本身產(chǎn)生的磁場的方向(見圖8)腿若。 在步進電動機中驼牵,通過兩種不同的方法解決了控制電流方向的問題。 基于線圈電流方向的磁場方向
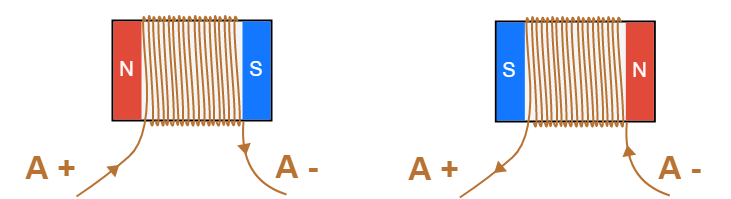
圖8:基于線圈電流方向的磁場方向
在單極步進電動機中谓蹂,其中一根引線連接到線圈的中心點(請參見圖9)蛮昭。這允許使用相對簡單的電路和組件來控制電流的方向。中央引線(A M )連接到輸入電壓V IN ( 見圖8 )漠恰。如果MOSFET 1處于活動狀態(tài)腋积,則電流從A M流到A +。如果MOSFET 2處于活動狀態(tài)蹲自,則電流從A M流出 到A-平敏,在相反的方向上產(chǎn)生磁場。如上所述颗介,這種方法可以簡化驅(qū)動電路(僅需要兩個半導體)
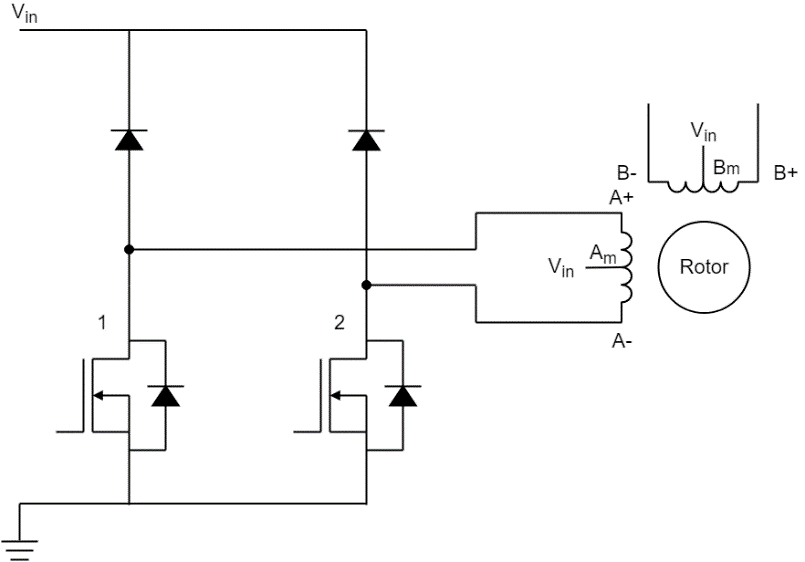
圖9:單極步進電機驅(qū)動電路
在雙極步進電機中愤惰,每個線圈只有兩條引線可用,并且為了控制方向赘理,必須使用H橋(請參見圖10)宦言。如圖8所示,如果MOSFET 1和4處于活動狀態(tài)感憾,則電流從A +流向A-蜡励,而如果MOSFET 2和3處于活動狀態(tài),則電流從A-流向A +阻桅,在相反的方向上產(chǎn)生磁場凉倚。該解決方案需要更復雜的驅(qū)動電路
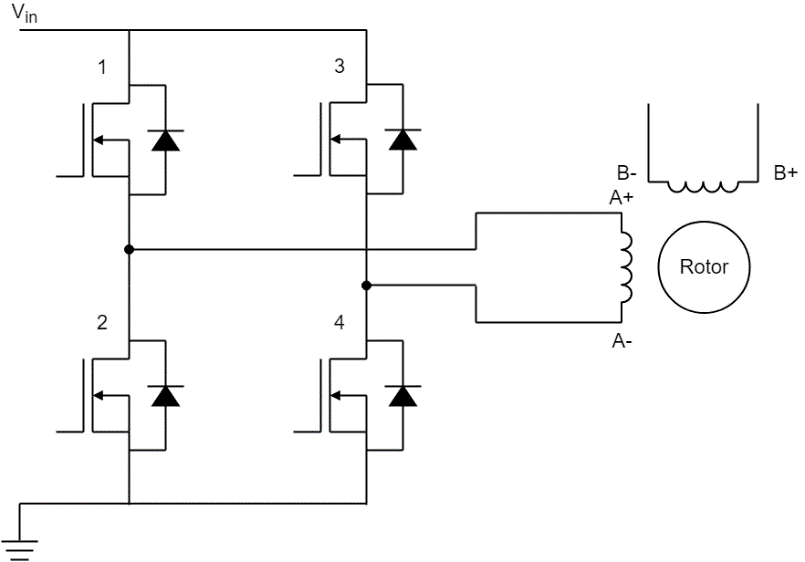
圖10:雙極步進電機驅(qū)動電路
隨著技術(shù)的進步,單極性的優(yōu)勢變得越來越不重要,而雙極性步進器目前最受歡迎稽寒。
