新聞來源:發(fā)布日期:2021-06-21
低壓直流無刷-伺服驅(qū)動(dòng)器是一款新型運(yùn)動(dòng)控制系統(tǒng),采用普通無刷電機(jī),通過增加編碼器的方式蜡幼,達(dá)到力矩模式,速度模式或位置模式的運(yùn)行效果贴袖。對(duì)比常規(guī)的伺服系統(tǒng),雖然轉(zhuǎn)矩脈動(dòng),低速平滑程度,動(dòng)態(tài)響應(yīng)不如伺服篙协,但勝在成本低,經(jīng)濟(jì)實(shí)用墓趋。因此,推薦該系統(tǒng)主要應(yīng)用于有走位置需求且成本控制較為嚴(yán)格的場(chǎng)景,比如繞線機(jī)奈兢,點(diǎn)膠機(jī)等喻秩。
同時(shí),該驅(qū)動(dòng)適配伺服電機(jī)啼插,也能較大提升運(yùn)行性能娃肃。
低壓直流無刷-伺服驅(qū)動(dòng)器產(chǎn)品參數(shù)

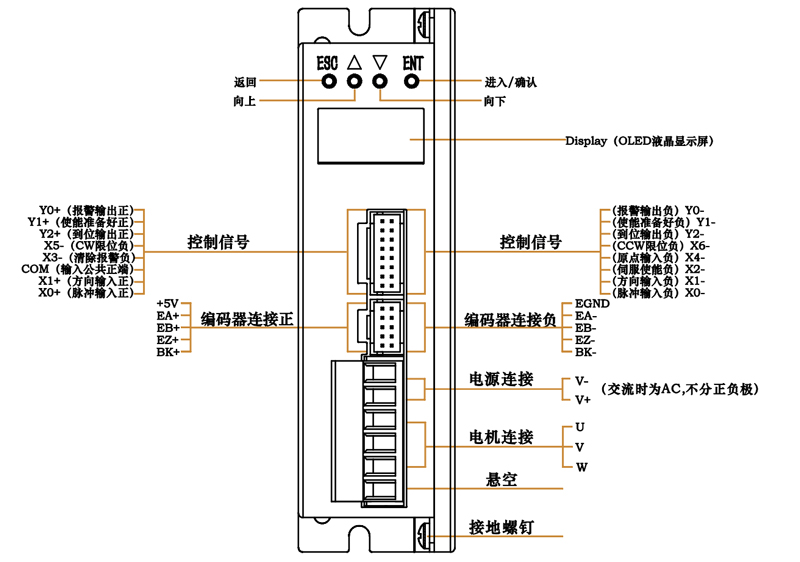
低壓直流無刷-伺服驅(qū)動(dòng)器產(chǎn)品示意圖
低壓直流無刷-伺服驅(qū)動(dòng)器產(chǎn)品功能
顯示及按鍵操作
?實(shí)時(shí)監(jiān)控。
?報(bào)警彈窗粱锐,并存儲(chǔ)報(bào)警代碼疙挺。
?在線調(diào)參。
轉(zhuǎn)矩-轉(zhuǎn)速-位置控制
低壓直流無刷-伺服驅(qū)動(dòng)器轉(zhuǎn)矩模式:
?數(shù)字量給定力矩:轉(zhuǎn)矩設(shè)定怜浅,過速報(bào)警铐然。
?轉(zhuǎn)矩-速度-轉(zhuǎn)矩模式:轉(zhuǎn)矩模式下,切至轉(zhuǎn)速控制恶座,當(dāng)檢測(cè)到堵轉(zhuǎn)在切入至轉(zhuǎn)矩模式搀暑。
應(yīng)用工況:模擬夾,抓跨琳,推等動(dòng)作自点。相較于單純轉(zhuǎn)矩模式,效率高脉让,可控性好桂敛。
注:短時(shí)輸出最大力矩,長(zhǎng)期輸出額定力矩溅潜。
低壓直流無刷-伺服驅(qū)動(dòng)器轉(zhuǎn)速模式
?模擬量給定-電位器調(diào)速(需定制):梯形加減速可調(diào)埠啃,需定制。
?速度多段(按照時(shí)間觸發(fā)):按照設(shè)定時(shí)間觸發(fā)電機(jī)轉(zhuǎn)速自動(dòng)切換枕捺。
?jog模式:按照設(shè)定速度一直運(yùn)行吮蒜,一般用于測(cè)試。
注:轉(zhuǎn)速控制模式下壁歧,轉(zhuǎn)速精度誤差為百分之1以內(nèi)催岔。
低壓直流無刷-伺服驅(qū)動(dòng)器位置模式
?脈沖方向,雙脈沖段扛,正交脈沖:最大輸入截止脈沖頻率400k惑叶,電子齒輪比可調(diào)。
?位置多段指令:16段位置多段指令袁虽,可根據(jù)設(shè)置目標(biāo)位置旭绝,并延時(shí)觸發(fā)下一段位置命令。
?寸動(dòng)指令:按照設(shè)定的數(shù)字位置運(yùn)動(dòng)坠髓,一般用于測(cè)試模式桨皂。
注:位置控制模式下茄码,位置精度誤差為±1個(gè)脈沖。
電機(jī)自校準(zhǔn)磁編
?出廠衰屡,固化電機(jī)校準(zhǔn)點(diǎn):在出廠時(shí)构韵,將電機(jī)校準(zhǔn)點(diǎn)寫入至驅(qū)動(dòng)器,永久保存趋艘。若更換電機(jī)疲恢,需進(jìn)行下述步驟,進(jìn)行校準(zhǔn)瓷胧。
?出廠后更換電機(jī)显拳,需發(fā)校準(zhǔn)命令:驅(qū)動(dòng)收到校準(zhǔn)命令,開始進(jìn)行校準(zhǔn)程序搓萧,自動(dòng)校準(zhǔn)杂数。校準(zhǔn)完成后,自動(dòng)存儲(chǔ)矛绘,永久保存耍休。
低壓直流無刷-伺服驅(qū)動(dòng)器產(chǎn)品定位
適用于高速(500-10000rpm),需要走位置(±10脈沖)的運(yùn)動(dòng)控制行業(yè)货矮。
本產(chǎn)品不適用于需要高響應(yīng)羊精,高精度及低速的場(chǎng)景。
特點(diǎn):
?高速囚玫,保持力矩太汹。優(yōu)于步進(jìn),類似傳統(tǒng)無刷方较。
?位置精度窗项。相比傳統(tǒng)無刷精度更高。
?價(jià)格便宜衷求。比伺服更具性價(jià)比帮声。
