新聞來源:發(fā)布日期:2021-03-13
?感謝您使用立三機電產(chǎn)品,本文章對于將定位運動單元 KV-XH16EC 和 立三總線驅(qū)動器 ECxxE 系列通過 EtherCAT 通信進(jìn)行連接時的步驟進(jìn)行描述胶勾。
立三機電
ECxxE系列總線驅(qū)動器
一. 準(zhǔn)備/布線

1. 準(zhǔn)備必要設(shè)備
請準(zhǔn)備以下設(shè)備姐呐。

*1 5e 類 STP(屏蔽雙絞線)重我。推薦采用鋁帶和編織的雙重遮蔽的 STP 電纜空盼。
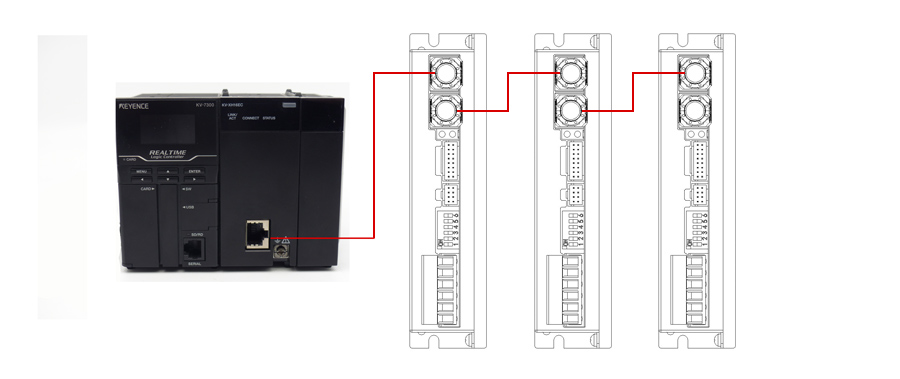
2思袋、 布線示意圖
通過 LAN 電纜連接 KV-XH16EC 的 EtherCAT 端口和步進(jìn)驅(qū)動器的 IN 端口册着。連接多臺總線步進(jìn)驅(qū)動器時褐着。 如下圖所示判莉, 請通過 LAN 電纜連接前邊驅(qū)動器的 OUT 端口和后邊驅(qū)動器的 IN 端口豆挽。
二、 KV-XH16EC 的設(shè)定
通過 KV STUDIO 執(zhí)行 KV-XH16EC 的設(shè)定。
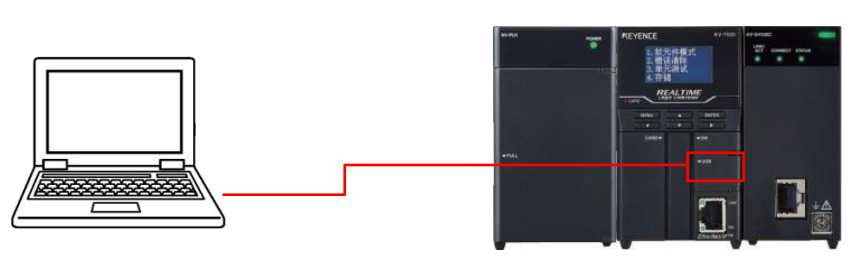
1. 連 接 PC 和 CPU 單 元 帮哈。
打開 CPU 單元本體的 USB 護(hù)罩膛檀, 通過 USB 電纜連接 PC 和 CPU 單元。
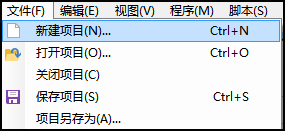
2但汞、 啟動 KV STUDIO宿刮,制作項目。
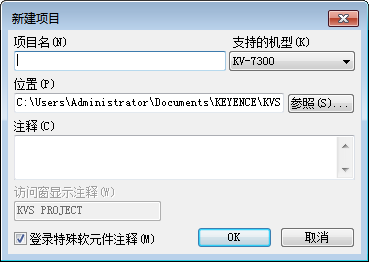
單擊菜單的” 文件(F)”->“ 新建項目(N)”私蕾。設(shè)定項目名稱和保存位置僵缺, 單擊“ OK”。
3. 選擇要使用的單元踩叭。
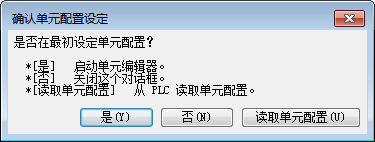
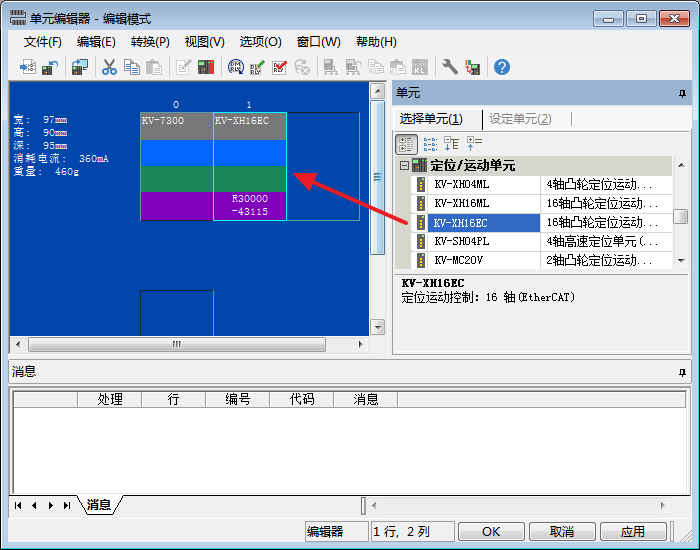
新建項目后磕潮, 會彈出“ 單元配置設(shè)定的確認(rèn)” 對話框,單擊“ 是(Y)”锋辩。會彈出單元編輯器暖经, 通過拖放(或雙擊)添加“ KV-XH16EC” 。單擊“ OK”叽燃, 關(guān)閉單元編輯器缕沟。
4. 設(shè)定軸配置。
4.1 ESI文件注冊
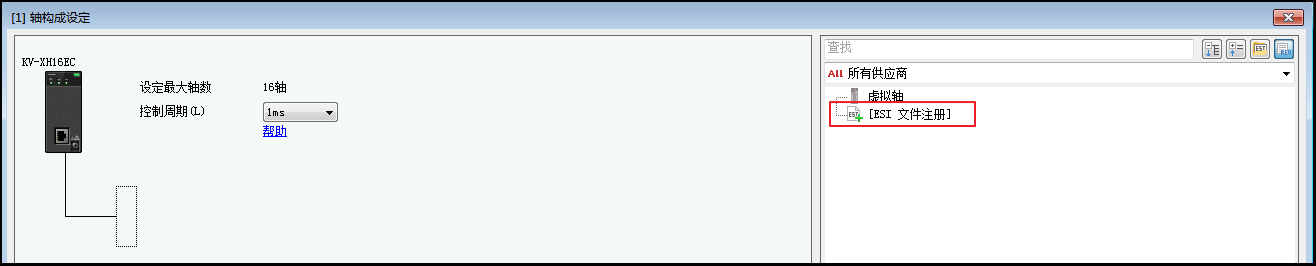
雙擊工作空間的“ 軸構(gòu)成設(shè)定”校惧, 彈出“ 軸構(gòu)成設(shè)定” 對話框葛暇。
雙擊“ ESI 文件注冊”, 登錄 ECxxE 系列的 ESI 文件竣篷。請從立三獲取 ESI 文件尼软。

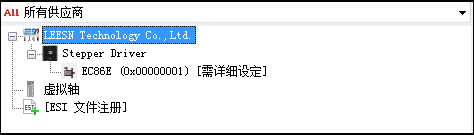
4.2 添加軸
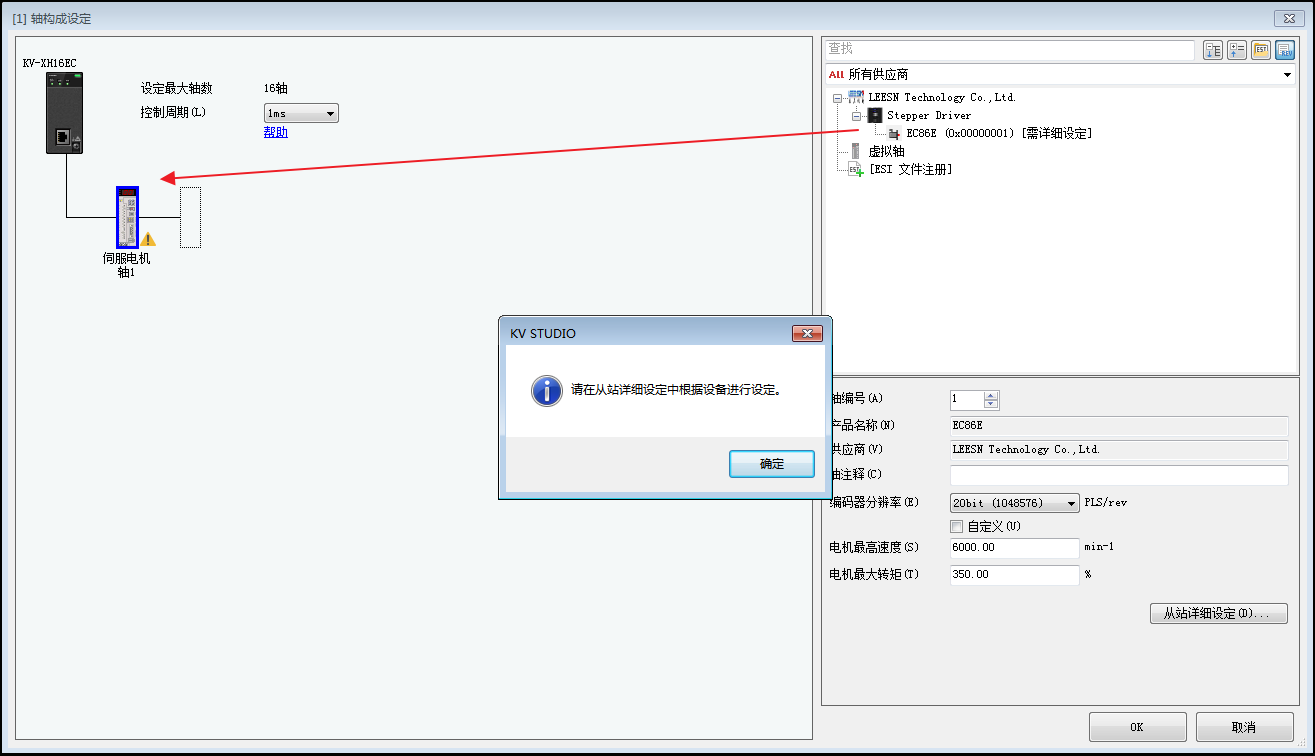
添加 ESI 文件后, 會添加“ LEESN Technology Co.,Ltd.” 傲丹, 對要使用的步進(jìn)驅(qū)動器的型號拖放后添加軸便透。
請單擊“ 從站詳細(xì)設(shè)定(D)” 后更改設(shè)定。
4.3 從站詳細(xì)設(shè)定
在上述窗口“請在從站詳細(xì)設(shè)定中根據(jù)設(shè)備進(jìn)行設(shè)定”點擊確定進(jìn)入酬俯,或者在“軸構(gòu)成設(shè)定”窗口右下點擊“從站詳細(xì)設(shè)定”按鈕進(jìn)入從站詳細(xì)設(shè)定窗口航厚。
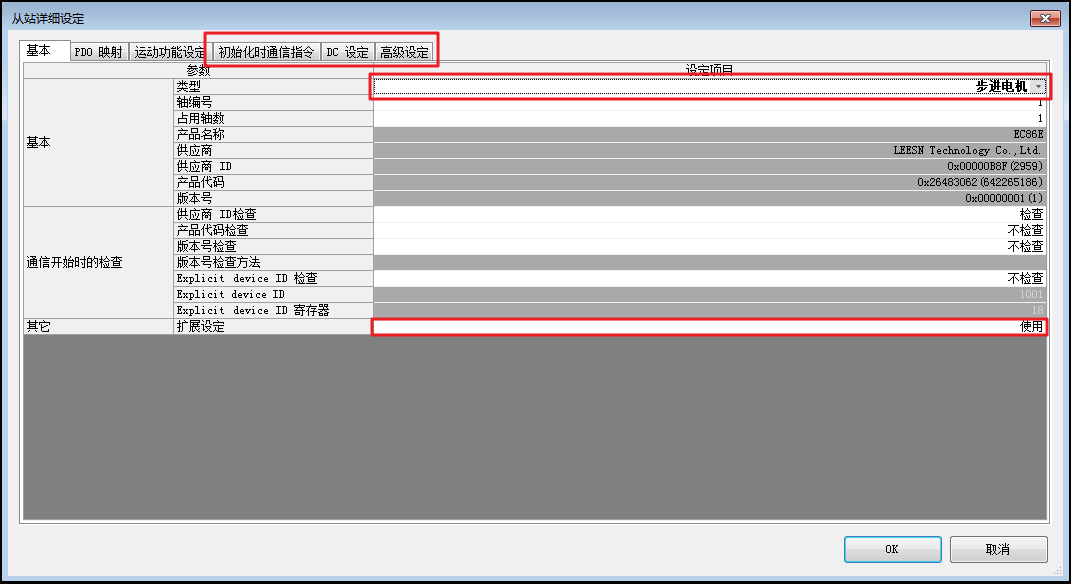
4.3.1 進(jìn)入從站詳細(xì)設(shè)定,修改“基本”锰蓬,通常修改“類型”為“步進(jìn)電機”阶淘,修改“擴展設(shè)定”為“使用”以打開“初始化時通信指令”、“DC設(shè)定”互妓。
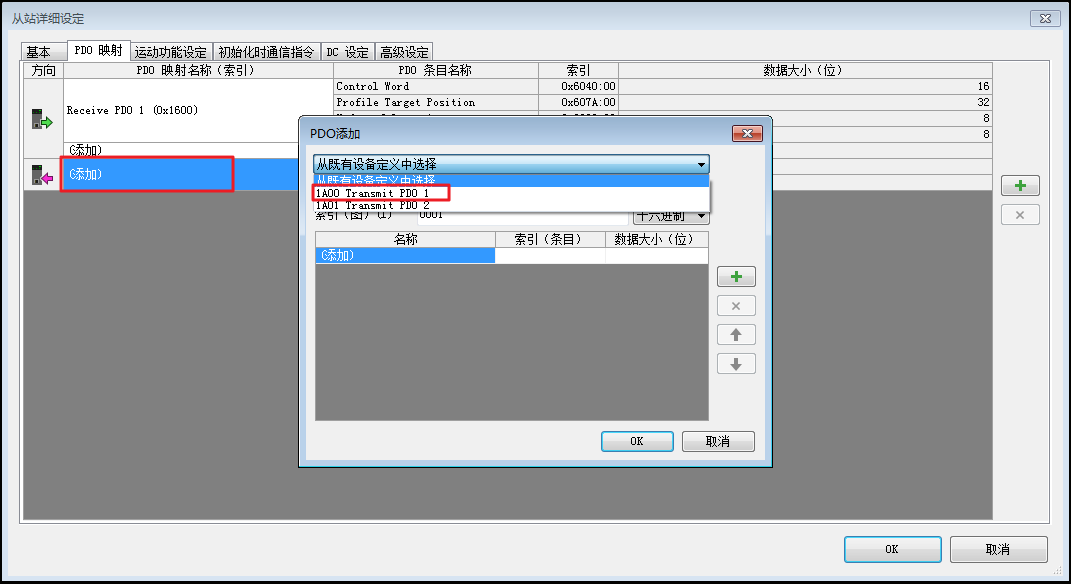
4.3.2 “PDO映射”設(shè)定
添加RPDO與TPDO
*該項為必須設(shè)定項

4.3.3 “運動功能設(shè)定”參數(shù)
*該項為必須設(shè)定項


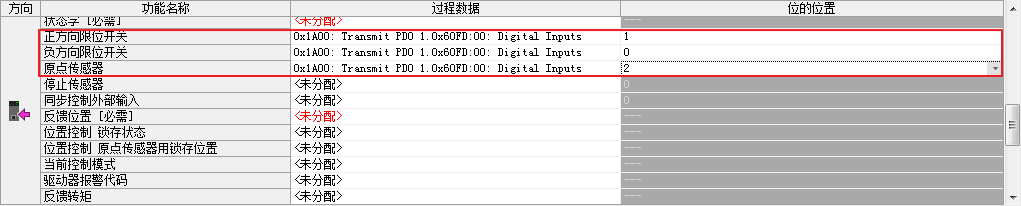
*關(guān)于PLC要使用驅(qū)動器上的原點溪窒,正負(fù)限位信號需要通過下圖設(shè)置方法設(shè)置,將正負(fù)限位以及原點的“過程數(shù)據(jù)”選擇為0x1A00冯勉,并將“位的位置”設(shè)置澈蚌,原點對應(yīng)位為2摹芙,正限位的位為1,負(fù)限位的位為0宛瞄。
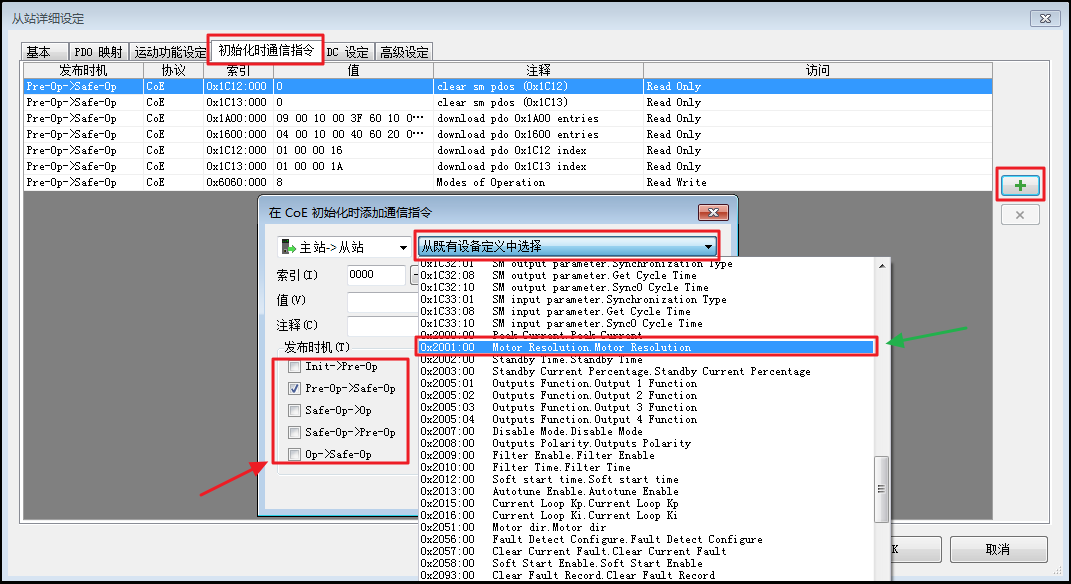
4.3.4 “初始化時通信指令”
*該項為根據(jù)需求設(shè)置浮禾,除去默認(rèn)設(shè)置外,我司推薦添加“額定電流“以及“運行細(xì)分”份汗,對應(yīng)下圖0x2000(額定電流)和0x2001(運行細(xì)分)盈电,發(fā)布時機選擇“Safe-Op->Op”。
4.3.6 “DC設(shè)定”與“高級設(shè)定”
*這兩項不推薦修改
4.3.7 保存設(shè)置
點擊“從站詳細(xì)設(shè)定”OK按鈕伤刑,保存設(shè)定探快,并點擊“軸構(gòu)成設(shè)定”OK按鈕關(guān)閉“軸構(gòu)成設(shè)定”窗口。
5. 執(zhí)行和坐標(biāo)變換相關(guān)的設(shè)定
關(guān)閉“ 軸構(gòu)成設(shè)定” 對話框后入撇,彈出下圖所示的對話框榨狐,請單擊“ 是(Y)” 。會彈出“ 坐標(biāo)變換計算” 對話框晤裆,根據(jù)工程需求咱漱,輸入和實際設(shè)備相符合的數(shù)值。單擊“ 計算執(zhí)行(E)” 后停间,可以確認(rèn)當(dāng)前設(shè)定條件下的計算結(jié)果温履。下圖是將 10mm 間距的滾動絲杠按 0.01mm 單位動作時的設(shè)定。設(shè)定后叙棚, 單擊“ OK(W)” 后自動映射設(shè)定垮登。
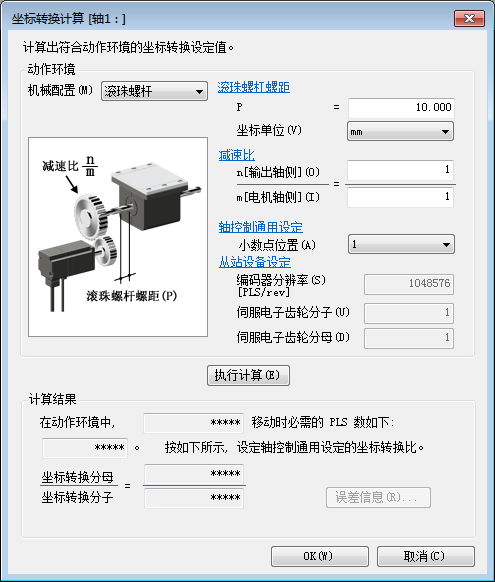
關(guān)閉” 坐標(biāo)變換計算” 對話框后重新計算時, 請單擊菜單的“ 工具(T)” ->“ 擴展單元設(shè)定(S)” ->“ KV-XH 設(shè)定(X)” ->“ 坐標(biāo)變換計算(G)”吠谐。
6.傳輸項目
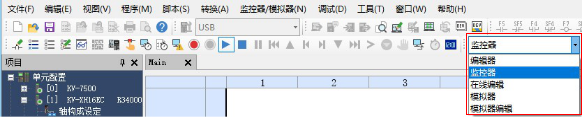
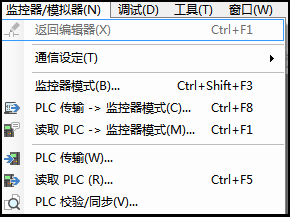
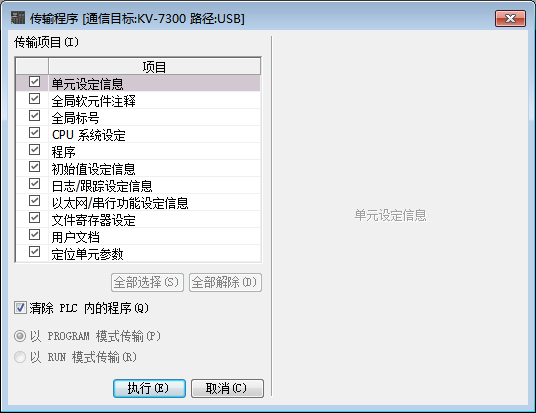
單擊菜單的“ 監(jiān)控器/模擬器(N)” ->“ PLC 傳輸-> 監(jiān)控器模式(C)”。會彈出“ 傳輸程序” 對話框坡疼,請單擊“ 執(zhí)行(E)” 后傳輸項目彬呻。
傳輸項目后, CPU 單元為 PROGRAM 模式時請切換為 RUN 模式
7柄瑰、執(zhí)行試運轉(zhuǎn)
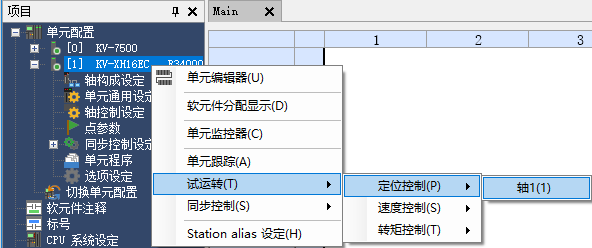
右鍵單擊工作空間的“ KV-XH16EC”闸氮,再單擊“ 試運轉(zhuǎn)(T)” ->“ 定位控制(P)” ->“ 軸 1(1)” 。會彈出“ 試運轉(zhuǎn)” 對話框教沾,再單擊“ 強制動作使能” 和“ 強制伺服 ON”蒲跨。確認(rèn)動作就緒、伺服就緒成為綠色亮燈狀態(tài)授翻,執(zhí)行 JOG 或點運轉(zhuǎn)確認(rèn)動作或悲。

如果軸未能正常動作時, 請再次確認(rèn)設(shè)定和布線等堪唐。
注*試運轉(zhuǎn)功能是僅當(dāng) KV STUDIO 處于監(jiān)控器模式/在線編輯模式時才可以執(zhí)行的功能巡语◆岬福可以從工具欄的下拉列表執(zhí)行 KV STUDIO 的模式切換。