新聞來源:發(fā)布日期:2021-07-26
本文設(shè)計的步進驅(qū)動器有连载,IO控制步進驅(qū)動器亚滑,模擬量控制步進驅(qū)動器、電位器調(diào)速驅(qū)動器,電壓調(diào)速驅(qū)動器传悍,搖桿調(diào)速驅(qū)動器,帶剎車驅(qū)動器浊笤,帶報警驅(qū)動器俱报,
感謝您選擇立三產(chǎn)品,特殊步進電機驅(qū)動器是立三根據(jù)大量客戶實際生產(chǎn)需求為基礎(chǔ)研發(fā)的鲜伶,針對不同的應(yīng)用場所裹侍,實現(xiàn)電機特定的功能需求。驅(qū)動器型號分別帶不同的后綴惨侍。
?
?后綴帶C IO控制模式
?后綴帶V 電位器調(diào)速模式
?后綴帶B 帶剎車功能
?后綴帶A 報警模式
驅(qū)動器的運行模式設(shè)置:
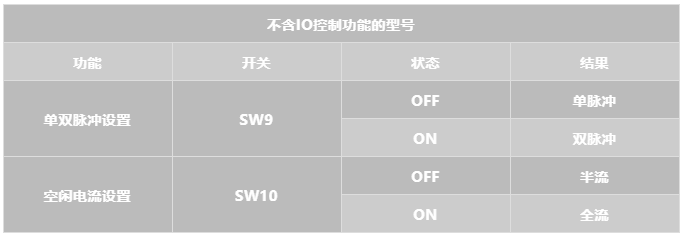
注:驅(qū)動器的運行電流驳鸿,在馬達停轉(zhuǎn)時可自動減少,SW10設(shè)定空閑電流為運行電流的50%或100%,當(dāng)需要輸出一個高的力矩時箱充,設(shè)為全流动苍。為減少馬達和驅(qū)動器的熱量,推薦將空閑電流在允許的情況下盡可能降低镰吆。

注:IO控制模式時內(nèi)置振蕩器帘撰,撥碼或開關(guān)量信號控制電機啟停,可外接電位器或電壓調(diào)速万皿。電機默認自動半流摧找。
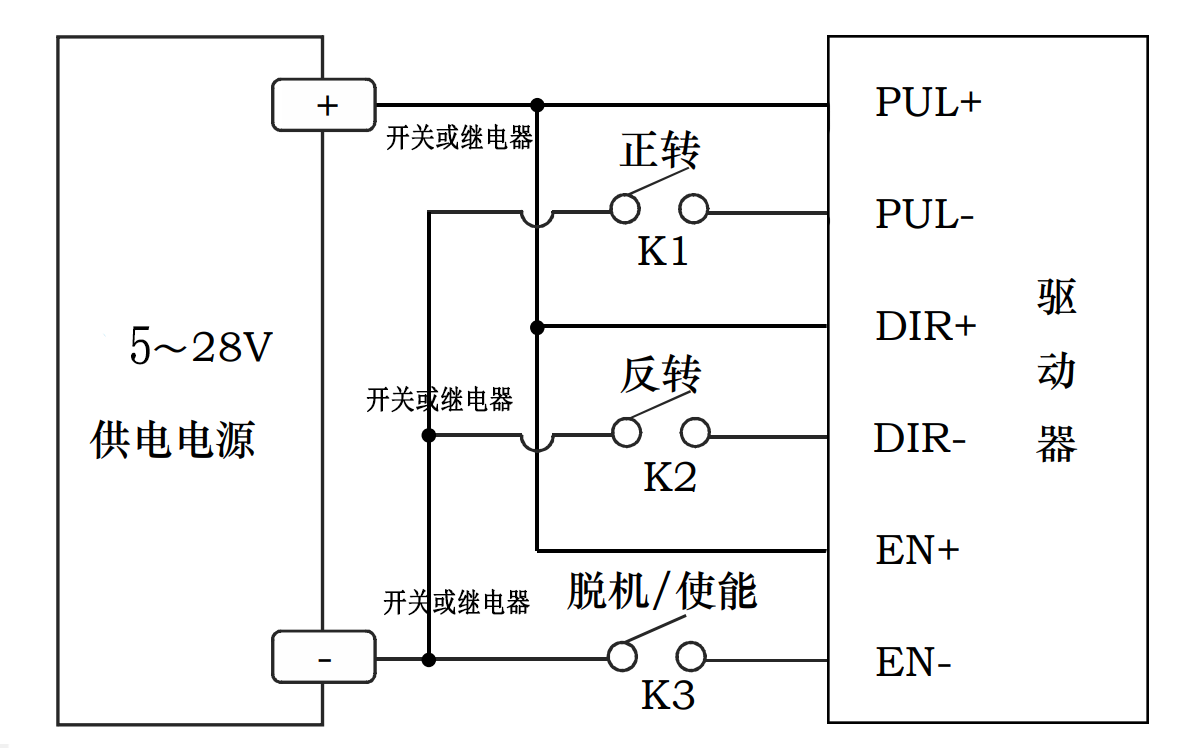
IO控制模式
IO控制模式(帶C驅(qū)動器)驅(qū)動器處于受控自運行模式。
實現(xiàn)方式:無需PLC發(fā)脈沖控制電機正反轉(zhuǎn)相寇,利用驅(qū)動器PUL+ PUL-和DIR+ DIR-控制端輸入5~28VDC電平信號即可實現(xiàn)電機正反轉(zhuǎn)慰于。
應(yīng)用:PUL+ PUL-端高電平DIR+ DIR-低電平或懸空,電機正轉(zhuǎn)唤衫,當(dāng)PUL+ PUL-端低電平懸空DIR+ DIR-高電平則電機反轉(zhuǎn)婆赠。
電機轉(zhuǎn)動速度可通過撥碼開關(guān)條件,16檔可選佳励。
注:PUL+ DIR+EN+接通5V~28V電源正端休里;PUL- DIR- EN-接通5~28V負端控制,負端可以使用繼電器控制也可以使用PLC控制赃承。
電壓調(diào)速模式
電壓調(diào)速模式(帶V驅(qū)動器)驅(qū)動器處于受控自運行模式妙黍。
定義:模式是受控自運行模式,驅(qū)動器無需通過信號源(PLC,控制板等)發(fā)送脈沖瞧剖,也無須給信號端輸入開關(guān)信號酷雌,驅(qū)動器即可控制步進電機做單一方向運動。速度可以通過撥碼開關(guān)設(shè)定名娶。
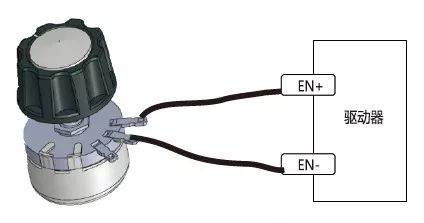
實現(xiàn)方式:無需PLC發(fā)脈沖/方向脈沖游禽,利用驅(qū)動器EN+ EN-控制端,外接100K及以上電位器,通過控制調(diào)節(jié)電位器的阻值實現(xiàn)電機由0到設(shè)定值速度的無級轉(zhuǎn)換植坝。
該驅(qū)動器的最高速度由撥碼設(shè)定尿笔。電位器電阻阻值越大速度越高,反之越小郑煌。0阻值時電機停止運轉(zhuǎn)临颈。
該模式下還有其它幾個衍生功能:
普通電位器調(diào)速:0~10V電壓調(diào)速;-10~10V電壓調(diào)速钾趁;搖桿調(diào)速等等
如下所示:
調(diào)速模式衍生驅(qū)動器
常規(guī)調(diào)速模式驅(qū)動器
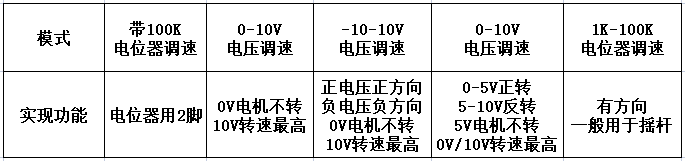
說明:持續(xù)自運行模式下蚂青,通過撥碼開關(guān)設(shè)定電機最高速度,可根據(jù)客戶需求定制胳瑟。通過外接電位器可調(diào)節(jié)蜻蒋,通過撥碼設(shè)定的最高速度至0轉(zhuǎn)/分之間任意速度。電位器阻值越高厢岂,速度越接近最高速度光督。用戶在選型電位器時盡量選用100K阻值及以上的電位器。阻值為0時塔粒,速度為0结借。
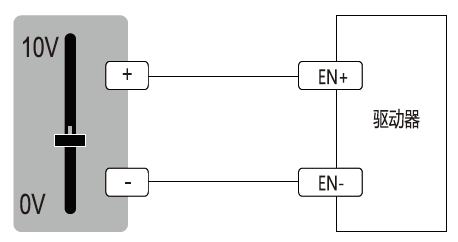
說明:持續(xù)自運行模式下,通過撥碼開關(guān)設(shè)定電機最高速度卒茬,可根據(jù)需求定制船老。用戶可改變輸入電壓來調(diào)節(jié)撥碼設(shè)定的最高速度至0轉(zhuǎn)/分之間任意速度。電壓越接近10V圃酵,速度越接近最高速度柳畔。電壓為0時,速度為0郭赐。
注意最高輸入電壓不得超過10.5VDC薪韩。
帶方向調(diào)速模式驅(qū)動器
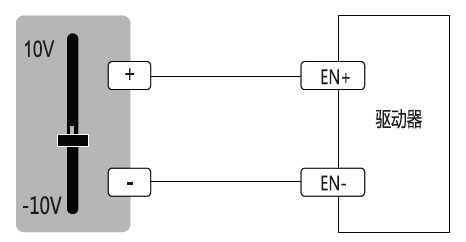
說明:根據(jù)電壓特點,實現(xiàn)電機正反轉(zhuǎn)捌锭,持續(xù)自運行模式下俘陷,通過撥碼開關(guān)設(shè)定電機最高速度。用戶可改變輸入電壓來調(diào)節(jié)速度和方向秋降,撥碼設(shè)定最高速度至最低速度颁膊。
1.電壓越接近10V,速度接近正向最高速度别逐,電壓為0撒殷,速度為0。
2.電壓接近-10V敢智,速度接近反向最高速度涣累,電壓為0隆鹤,速度為0。
注意最高輸入電壓不得超過10.5VDC蹦争。
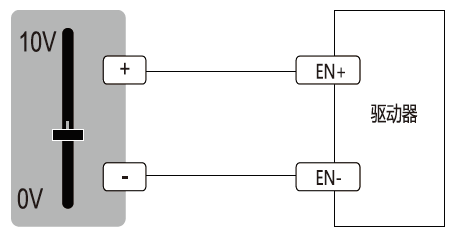
說明:根據(jù)電壓特點,實現(xiàn)電機正反轉(zhuǎn)酪捏,持續(xù)自運行模式下瑞捂,通過撥碼開關(guān)設(shè)定電機最高速度。用戶可改變輸入電壓來調(diào)節(jié)速度和方向层锄,撥碼設(shè)定最高速度至最低速度酷麦。
1.電壓為5V,速度為0喉恋。電壓為0V或懸空時沃饶,速度接近正向最高速度。
2.電壓接近10V轻黑,速度接近反向最高速度糊肤,電壓為5V時,速度為0氓鄙。
注意最高輸入電壓不得超過10.5VDC馆揉。
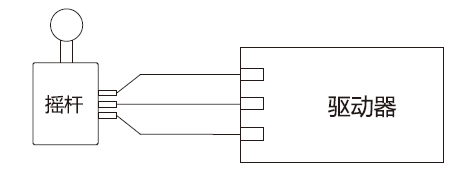
搖桿調(diào)速
利用搖桿的電阻分壓特性,精準(zhǔn)識別搖桿的角位大小變化抖拦,實現(xiàn)電機正反轉(zhuǎn)和調(diào)速升酣。持續(xù)自運行模式下,通過撥碼開關(guān)設(shè)定電機運行速度态罪,可根據(jù)客戶需求定制噩茄。
1.搖桿位置在中間 電機停止運動;
2.搖桿位置偏移复颈,電機方向和速度同時變化绩聘,變動角位越大速度越接近撥碼設(shè)定最高值。
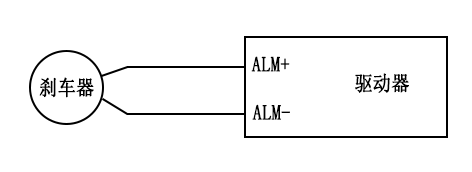
帶剎車功能
普通步進電機斷電不會自鎖隆文,上電才會自鎖美卒,要實現(xiàn)斷電自鎖,需在步進電機尾部加裝一個抱閘裝置(剎車裝置)韧践,并且關(guān)聯(lián)到步進裝置的電路上轿战。
電機上電時,抱閘也上電随象,剎車裝置脫離步進電機輸出軸载蜓,電機正常運轉(zhuǎn),當(dāng)斷電時聪蔬,剎車釋放緊緊抱住電機軸肄绢,確保斷電瞬間鎖定電機當(dāng)前位置屯片,避免電機在斷電狀態(tài)下發(fā)生位移變動造成電機當(dāng)前運動數(shù)據(jù)錯誤。
立三帶剎車步進電機驅(qū)動器集成有專門的剎車器控制電路详毡,無需額外增加12~24VDC電源床重。
特點如下:
1、接線簡單耻陕。
2拙徽、由于工作電壓點,所以溫升低诗宣,基本和步進電機保持一致膘怕,實測溫升十幾度。
3召庞、可靠性高岛心,由步進驅(qū)動器直接控制電機和抱閘,能百分百保證在電機轉(zhuǎn)動時抱閘始終處于松開狀態(tài)篮灼,如果抱閘出現(xiàn)故障忘古,驅(qū)動器會報警,電機停止轉(zhuǎn)動穿稳,防止損壞電機及抱閘存皂。
4、節(jié)約成本逢艘,省掉繼電器等外部器件旦袋。